Assignment 1
Dipendra Kumar Misra (Y9201 CSE)
To Do List
- Robot A,Robot B and Robot C have been implement in a single Java file. Code will be posted on the morning of Jan 14 2012.
[README FILE] - A) Robot A [performance file for (3,5)][performance file for (7,1)]
- B) Robot B [performance file for (3,5)][performance file for (7,1)]
- C) Robot C [performance file for (3,5)][performance file for (7,1)]
also for comparison of Robot B and Robot C we can look at the table
(3,5) (7,1) Robot A 2.7, 3.6, 4.0, 5.4 0, 0.9, 1.2, 2.3 Robot B 4.3, 5.6, 6.3, 7.4 , 7.6 3.9, 4.2, 5.1, 5.9, 6.8 Robot C 7.3 6.5 thus in most cases Robot C beats Robot B by a marginRobot (1,4) (8,5) (1,1) (5,5) Robot B 5.9, 6.3 5.2, 6.9 6.1, 6.3 4.3, 5.7, 6.1, 7 Robot C 7.0 7.2 7.0 6.7 - D)
Qs) In what environments will a simple reflex agent be perfectly rational?
Ans: In a completely visible and deterministic enviroment our simple reflex agent will be perfectly rational.
Qs) A robot is deterministic if it always behaves in the same way in the same situation. Is your greedy robot in B deterministic?
Ans: Robot B is not deterministic since incase of a tie - that is if two or more neighbhoring square have equally optimum value then robot B uses random numbers to break the tie. This is apparent by the multiple values provided in the table above.
Qs) Can you design an environment in which a randomized agent will perform poorly?
Ans: A randomized agent will behave poorly that is the expected amount of dirt cleaned will be low in the case where there is one streak [sequence] of highly dirty slabs and all the rest are either not dirt or very less dirty. In this case while both robot B and robot C will perform well there is very low probability that robotA will enter the highly dirty streak of squares. Ex: the following grid - the robot is at position (2,2). It is very unlikely that the robot will follow the R-S-R-S-R-S-R-S pattern which is the optimum answer.0.1 0 0 0 0 0 0 0.1 0.02 0.01 0 0 0 [0] 1 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0
Qs) Consider how your rational agent would change its behaviour in the following situations: Assume that it's sensing is noisy, so the observations are inaccurate by at most 20%.
Ans: My robotC finds out the amortized cost of sucking. So if I have a square at distance 5 away whose dirt is 0.8 then its amortized cost is 0.8/5 . If sensing is inaccurate by at most 20% then the robot may no longer make the optimum choice. So if there are two square A and B at equal distance away and if A has dirt of 1 and B has dirt of 0.8 then my robot will go to the square A. However on sucking it may find that A is actually 0.8 and B is 0.96 then my robot makes the wrong choice.
Qs) Cleaned squares can become dirty, with the probability of this happening being a gaussian centered at 20 moves, with a s.d. of 10. The amount of dirt is a random number between [0,1].
Ans: My robotC maintains a table of previously visited cell and it believes that these squares have been sucked and are now clean. Now if after some move one of the previously visited square becomes dirty with a highly value say 0.9 and also assume all of its surrounding squares are 0 then I have no way to update this information unless I visit one of its neighbor. But its amoritzed cost is 0 since its value according to robotC is 0. Hence robotC will avoid going to this square or its neigbhor and hence will not suck it.
- E)
Borrow someone's digital camera, keep it at a height of about 30 cm (your robot height), and take an image of a corridor with some dirt on it. "Dirt" can be anything - papers, clothes, dirt, cups, etc. With respect to the image you have shot:
![Image of dirt [leaf] on floor showing point A,B and C](12012012092.jpg)
Qs) How would you determine where the floor lies in the image, and where there are walls etc. state any assumptions of prior knowledge you need to make.
Ans: I take the following reasonable assumptions -- - Robot knows the height of the camera to be 30cm
- - Robot is able to detect difference in texture / sharp edges
Qs) Use a grid size of 0.5m, and indicate how the location of the dirt can be mapped to a grid
Ans: The robot will divide the image into grid according to the grid size. Then it will use filters or other techniques to find intensity variations in each grid. Example we can take a Canny filter or Gaussian filter. Finally based on the variation in each grid we assign parameter to a grid and represent it in a 2D matrix.
Qs) Would a value between 0 and 1 be good enough to map the "dirt" in each grid?
Ans: It will not be good enough for the reason that dirt is characterized by intensity variation, texture difference, height and shape etc. hence a single number between [0,1] will not be a good choice for mapping dirt. Example if we take intenstiy difference then edges of wall etc. will also be mapped as dirt.
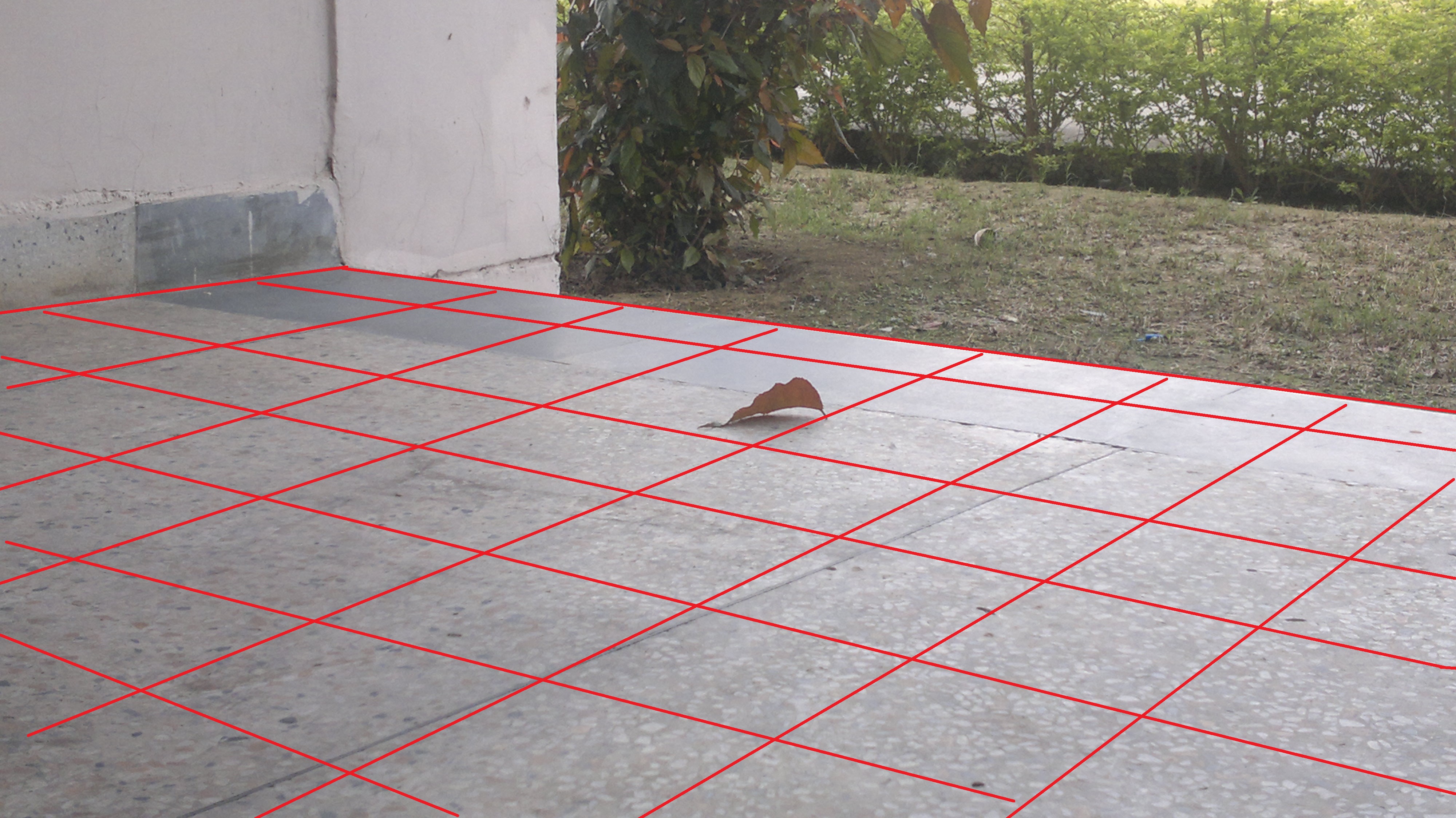
Qs) Consider how the robot might determine its own position using the image?
Ans: First the robot identifies the two lines AB and AC. It sees that only edges of floor has come hence it must be opposite the corner (somewhat). Similarly if three edges come then it is opposite to the center edge. I make two assumptions at this point which are very reasonanble -- - Robot knows the height of its camera which is 30cm
- - It knows the angle subtended by its camera