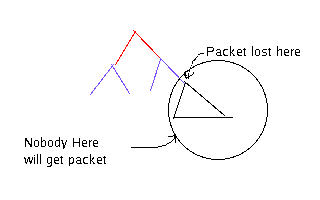
Fig. 1
- Thus there will be per receiver state at Sender.
- Another problem is that well defined parameters in unicast may not be of any meaning for reliable multicast. e.g. RTT, CWND, etc.
- And Hence Receiver Based Approch is needed for Reliable multicast
TCP uses byte number for sequencing.
However that has problem with multicast.
- Whether to maintain sequence numbers per source or independant of source.
- If we maintain sequence number per source then there will be problem when there are multiple senders of the same data (replicated servers). This is because if one of the server fails then other server may start sending but will be having diffrent sequence number and thus the receiver will be confused and falsely assuming loss of data.
- Sequence number wrap arond can take place and then late joining receivers will not be knowing whether to ask for previos packet as random sequence number are used in TCP at start.
- Also this problem can come with intermidiate partitions.
- Framming done by the application and thus unit of data is defined by application
- e.g. "Block 5 of sildes.ppt"
- Now FTP /TCP can also use this.
- Now with this technique in multicast, sequence number can be per source or independant of source and anyone having data can retransmit.
Reliable Multicast Protocol
- Does not gurantee Ordering
- But gurantees sending of data to all receivers.
- Each receiver keeps track of the sequence number received (per sender or information in frame)
- Periodic session messages are sent by the each sender. It contains highest sequence number sent so far and also time stamp. (for estimation of RTT).
- This is needed because:
- Assume that sender sends sequence number 1,2,3,4,...
- If sequence number 4 gets lost then receiver is not able to know whether packet has lost or sender has stopped sending the data. Hence sender sends periodic session messages.
On loss detection :
Consider following scenario shown in figure
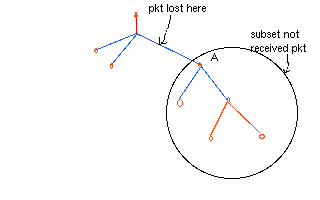
figure 2
- Each node in the subset (shown inside the circle) will set timer with random values for time outs
- One of them will eventually time outs and fires the multicast-repair-request.
- Anybody having packet then can multicast the packet.
Random Timer values
-
Repair Timer
- Uniform in [C1, C1+C2] x d(S,A) , where S is source and A is node for which we are setting value of the timer. 'd( )' is distance function.
- Here Closest to source will detect loss first as its value of time out will be lowest.
-
Responce Timer
- Uniform in [D1, D1+D2]x d(B,A)
- If C1 high-
- Large repair delay
- But more suppression for farther nodes
- If C2 is high-
- Larger responce delays
- but more suppression for larger group size.
- Similarly for D1 and D2
Extentions
There should be Adaptive values for C1, C2, D1 and D2The values should be adapted based on
- observed delays
- observed duplicate request frequency
Also adaption should be application specific as different applications need diffrent tolerance to delays and no. of duplicates
e.g.
For White Borad - Fast repair are needed
For s/w updates - No need of fast repair.